19
Apr-2022
by 博乐图
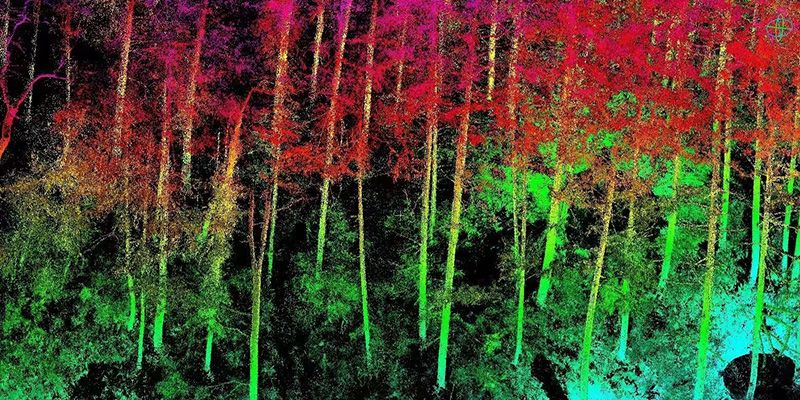

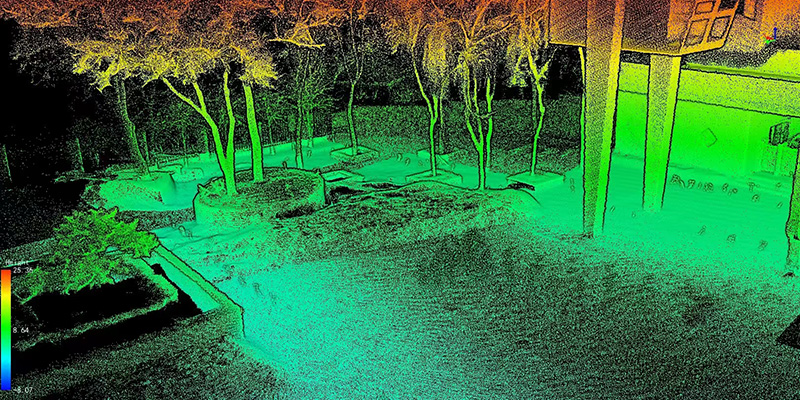
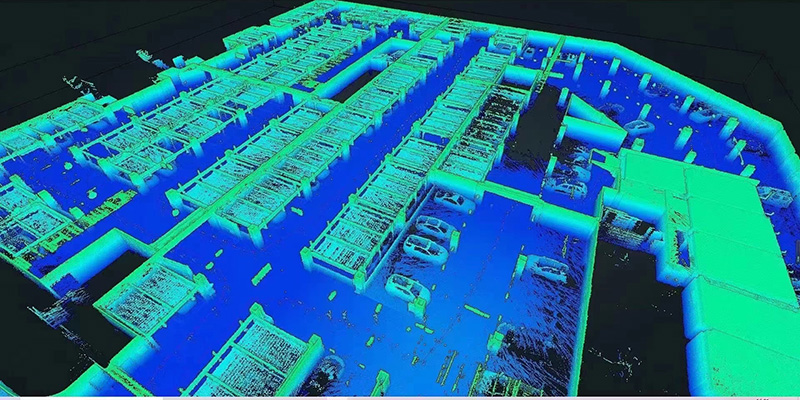

三维激光扫描采用非接触式高速激光测量方式,来获取地形或复杂物体的几何图形数据和影像数据,通过后处理软件对采集的点云数据和影像数据进行处理分析,转换成绝对坐标系中的三维空间位置坐标或者建立结构复杂,不规则场景的三维可视化模型,既省时又省力,同时点云还可输出多种不同的数据格式,做为空间数据库的数据源和满足不同应用的需要。三维激光扫描技术可以将现实场景1:1以点云形式呈现在计算机中,所以又被称之为实景复制技术。
随着无人机应用领域的不断扩大,无人机对周围环境感知的需求逐渐加大,激光雷达技术的应用成为无人机研究领域的重要发展趋势.为解决无人机在飞行过程中周围环境复杂导致现场定位信号较差的问题,基于三维激光雷达,结合大疆无人机的Onboard SDK技术,设计机载激光点云采集系统以及激光点云处理算法.为了降低激光采集系统的操作难度,设计避障算法,在飞行既定路线的同时结合激光点云进行避障飞行.利用激光点云SLAM算法,实现了无人机对周围环境的三维建模,以达到无人机对周围环境感知的目的,并通过实际测试验证了所提方法的有效性。
